과학학습콘텐츠
각 과학주제를 목록이나 연대기 형태로 검색할 수 있고 주제별 이야기도 가득 있습니다.
국립중앙과학관 전문가 및 자문위원분들이 검증해 주신 소중한 자료입니다.
과학학습콘텐츠
각 과학주제를 목록이나 연대기 형태로 검색할 수 있고 주제별 이야기도 가득 있습니다.
국립중앙과학관 전문가 및 자문위원분들이 검증해 주신 소중한 자료입니다.
|
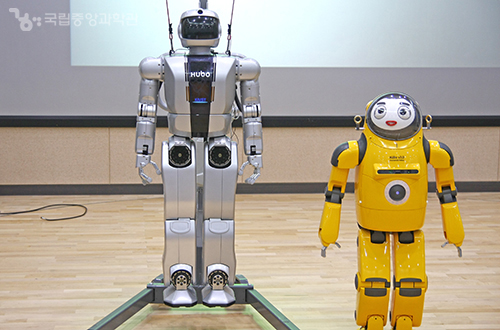
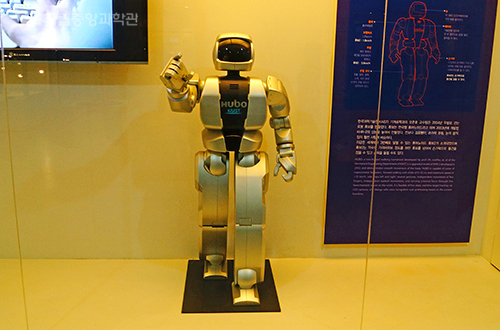
국내 최초 두 발로 걷는 휴머노이드 로봇
|
|
| 이름 |
휴보
|
|---|---|
| 영문명 |
HUBO
|
| 개발년도 |
2004
|
| 내용 |
한국과학기술원 기계공학과 오준호 교수팀이 개발한 국내 최초의 두 발로 걸을 수 있는 휴머노이드 로봇이다.
2004년 12월에 한국과학기술원(KAIST) 기계공학과 오준호 교수팀이 개발한 두발로 걸을 수 있는 대한민국 최초의 2족 보행 휴머노이드 로봇이다. 휴보의 제작 기간은 3년으로 제작비용은 1억원이다. ‘HUBO’는 휴머노이드(Humanoid)와로봇(Robot)의 합성어로, 이 로봇은 키 120cm, 몸무게 55kg이고, 보행속도는시속 1.25Km로 35㎝의 보폭으로 1분에 65걸음을 걸을 수 있다. 뛰거나계단을 오르내리지는 못한다.
KAIST에서는 2002년 1월부터 휴머노이드 로봇 개발을 시작하여, 2002년 8월 KHR-1의 몸체를 만들고,2003년 1월에는 KHR-1을 걷게 하였다. 이어 2003년 12월 KHR-2의 몸체를 제작하였고, 2004년 8월 KHR-2는 줄을 끊고 걷기 시작했다. 이 KHR-2의 기능과 안정성을 크게 강화하여 새롭게 제작한 모델이 휴보이다.
눈에는 2대의 CCD카메라가있고, 각기 따로 움직일 수 있도록 되어 있다. 배터리는가슴 안쪽에 위치하고 있는데, 한 번 충전하면 약 90분동안 움직일 수 있고, 몸체는 폴리에틸렌 재질로 제작되었다. 무릎, 발목, 팔목, 허리 등에 총 41개의 전동기(관절모터)가 장착되어 몸을 자연스럽게 움직일 수 있다. 따로 움직이는 손가락으로‘가위 바위 보’도 할 수 있다. 몸통에는 몸의 균형을 잡아주는 센서와 발바닥의 기울기를 측정하는 센서 등이 있어서 한 발로 서서 몸의 균형을잡을 수도 있어서 사람과 블루스도 출 수 있으며, 손목에 실리는 힘을 감지하여 악수할 때 적당한 힘으로손을 아래위로 흔들기도 한다.
|
|---|---|
| 안내 |
|
| 관련링크 | |
| 관련 과학관 & 사진 자료 |